Contexte
Dès 2023, le démonstrateur Themis sera capable de réaliser une mission non orbitale qui permet d’atteindre une certaine altitude à une certaine vitesse.
Une exploitation naturelle de cette capacité est de réaliser des missions de type fusées sondes, avec ou sans déploiement de charge-utile en phase de culmination.
Les expériences ou les objets embarqués devront pouvoir être testés dans un environnement de microgravité, avoir la capacité à être largués dans le vide, de mesurer des paramètres physiques dans l’atmosphère, de réaliser une rentrée atmosphérique ou de pouvoir observer l’univers dans le vide sans pollution lumineuse.
Description
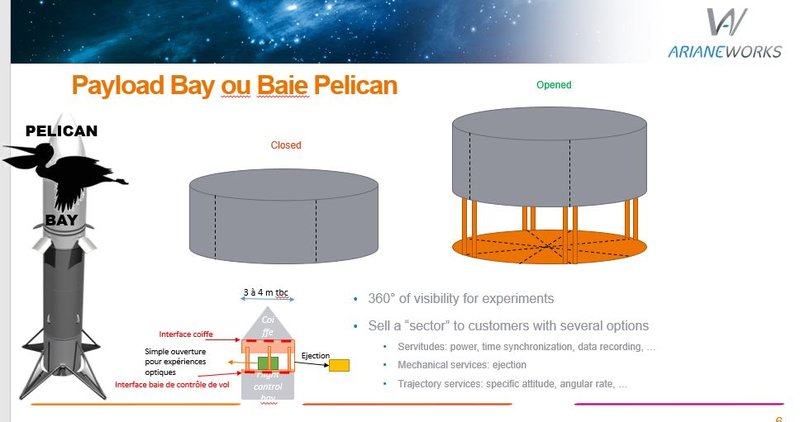
Pour réaliser ce type de missions, plusieurs sous-systèmes spécifiques sont nécessaires et rassemblés dans un module appelée « module PELICAN » ou « PELICAN BAY » composée de :
- Un ou des sous-systèmes de déploiement d’objets largués et d’expériences embarquées (ces éléments peuvent être livrés par le client si compatible des spécifications d’interface)
- Une « Bay management Unit » faisant la commande de tous les mécanismes et distribuant la puissance nécessaire.
- Une structure cylindrique dynamique ou « virole mobile » permettant une ouverture vers l’extérieur : ce soussystème constitue le projet proposé ici
- Une structure de transmission d’effort de la poussée qui peut être inclues dans le périmètre fonctionnel de la structure précédente
Ce « module PELICAN », permettrait de déployer les expériences sans avoir besoin d’être largué au préalable comme une coiffe ou d’avoir à l’équiper d’un système de récupération. Elle a des interfaces mécaniques avec le module de contrôle de vol et la coiffe, nécessaire à l’aérodynamique (voir schéma de principe).
L’idée est de récupérer Thémis et sa partie haute complète (module + coiffe) indissociablement. Cela évite de produire une nouvelle partie haute et de limiter les activités de récupération et de remise en état.
Illustration des interfaces
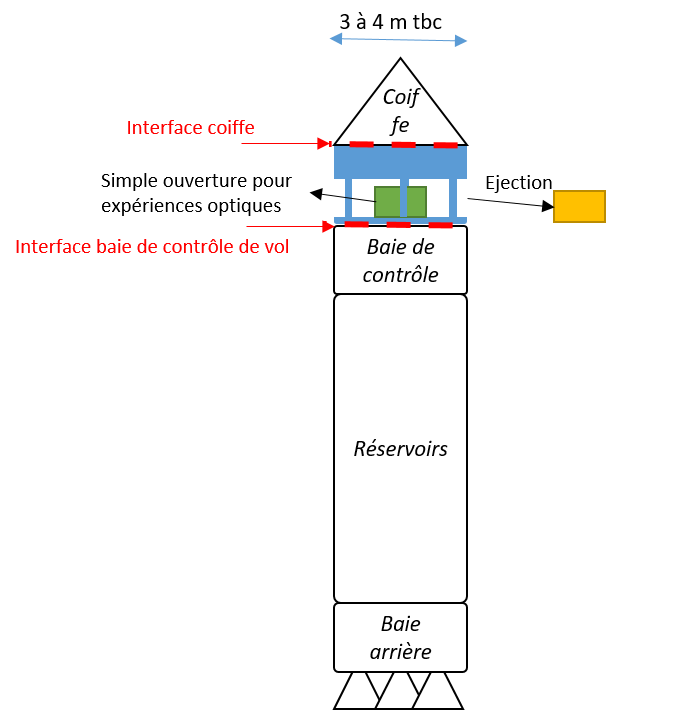
Illustration d’un exemple de concept de virole mobile
Analyse fonctionnelle
L’analyse fonctionnelle est à détailler suivant toute les phases de vie du véhicule :
- Phase de développement
- MAIT
- Intégration des charges utiles et intégration sur le véhicule
- Opérations de lancement
- Phase de vol au décollage
- Phase de vol en microgravité
- Phase de retour en vol
- A l’atterrissage et postatterrissage
- Remise en état et stockage
- Fin de vie
Plusieures spécifications non-fonctionnelles seront précisées mais qui pourront être adaptées à l'échelle des différents prototypes souhaités et de la priorisation des fonctions à tester.
Elles seront de plusieurs ordres:
- Programmatique
- Géométriques
- Mécaniques
- Environnement
- Electrique
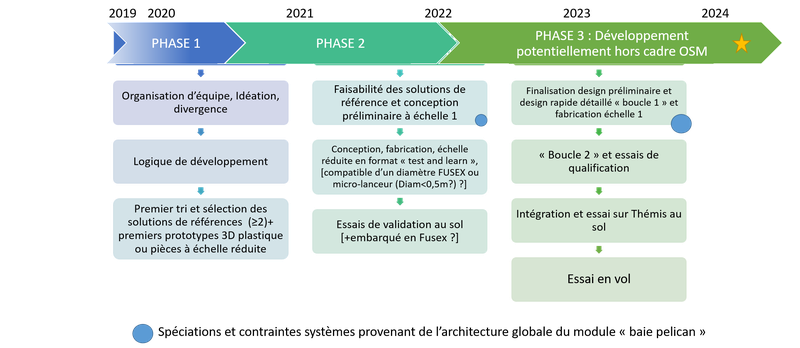
Roadmap
Une Road map permet de placer dans le temps les grandes activités proposées.
Activités réalisées
Activités de conception assitée par ordinateur et réalisations Hardware piloté.
Ce projet a mobilisé les équipes pour les échéances 2021 et 2022 du projet parent Ad Astra.