 Open Clinostat 3D
Open Clinostat 3D
DESCRIPTION DU PROJET
IDENTIFICATION DU PROJET
Nom du projet : OPEN CLINOSTAT 3D
Identifiant projet fourni par Fédération OSM : ?
Date de dépôt : 19 Février 2019
Résumé :
- Un clinostat 3D, ou « clinostat à deux axes » (en anglais random positioning machine ou RPM, machine à orientation aléatoire) permet de simuler un effet de microgravité. Ces machines se composent de deux cadres, l'un placé à l'intérieur de l'autre, chacun tournant de façon indépendante à une certaine vitesse, permettant la rotation d'échantillons dans toutes les directions de l’espace. Les échantillons biologiques ne peuvent plus faire référence à la gravité et des expériences précédentes montrent des comportements équivalents au 0 gravité.
- On souhaite proposer une solution en auto-construction à partir d’éléments bon marché du commerce et de solutions open source, à usage semi-professionnel ou pédagogique pouvant accueillir des expériences biologiques embarquées dans un volume utile au standard CubSat (jusqu’à U27) pouvant servir à tester des expériences à vocation spatiale.
- L’argent sera utilisé pour acheter les matériaux nécessaires à la construction de l’ossature, aux moteurs et engrenages nécessaires à la propulsion, aux cartes électroniques et aux pilotes, au développement du logiciel.
- Prototype opérationnel testé avec un échantillon vivant fourni par la Station Biologique de Roscoff
- La méthodologie du design est basée sur les modèles de la science frugale et de l’open source et est mise en œuvre par une équipe pluridisciplinaire composée de scientifiques, d'artistes, de makers, de designers et de chercheurs en sciences humaines.
- Une équipe pluridisciplinaire est montée : Le projet OPEN CLINOSTAT 3D est développé au fablab Plateforme C avec les membres de l’association PING de Nantes et le soutien de l’initiative Fédération – Open Space Makers, l'accompagnement du CNES et du laboratoire M3 de la Station Biologique de Roscoff (CNRS - Sorbonne Universités).
- Cette équipe a déjà développé un « proof of concept » de l’OPEN CLINOSTAT 3D en cours de test et a mis à disposition une documentation sommaire technique en Open Source.
Ce projet a aussi une dimension artistique et de vulgarisation puisque des travaux dérivés serviront notamment à une exposition….
Site Web Projet :
https://www.federation-openspacemakers.com/fr/participer/projets/open-clinostat-3d/
Catégorie du projet : ?
COMPOSITION DE L’EQUIPE (QUI)
COORDINATEUR
Miha Turšič
Organisation : WAAG SOCIETY AMSTERDAM
Adresse : https://waag.org/nl/over-ons
Nieuwmarkt 4
1012 CR Amsterdam
Tel. +31 (0) 20 5579898
CV : http://www.artscienceforum.nl/community/miha-tursic
AUTRES MEMBRES
Xavier Bailly
Organisation : Laboratoire M3 (Modèles Marins Multicellulaires) CNRS - Sorbonne Universités. Station biologique de Roscoff
Adresse : http://www.sb-roscoff.fr/
CNRS / Sorbonne Université STATION BIOLOGIQUE DE ROSCOFF
Place Georges Teissier 29680 Roscoff
+33 0 2 98 29 23 23
CV : https://www.researchgate.net/profile/Bailly_Xavier
Julien Bellanger
Organisation : PING
Adresse : https://www.pingbase.net/
Association PiNG : 38 rue du Breil - 44100 Nantes
info@pingbase.net
Tel : 02 40 16 86 78
CV : http://fr.viadeo.com/fr/profile/julien.bellanger1
Jean-Philippe Blanchard
Organisation : PING
Adresse : https://www.pingbase.net/
Association PiNG : 38 rue du Breil - 44100 Nantes
info@pingbase.net
Tel : 07 69 35 30 12 Mail : jph dot blanchard at gmail dot com
CV : https://www.linkedin.com/in/jphblanchard/
Ewen Chardronnet
Organisation : Makery
Adresse :Makery - Art2M
44 rue Albert Thomas - 75010 Paris
Téléphone
Mail
Skype
CV : https://www.linkedin.com/in/ewenchardronnet/
Mathieu Gonnet
Organisation : PING
Adresse : https://www.pingbase.net/
Association PiNG : 38 rue du Breil - 44100 Nantes
info@pingbase.net
Tel : 02 40 16 86 78
CV : https://www.linkedin.com/in/mathieu-gonnet-3b379142/?originalSubdomain=fr
François Robin
Organisation : Semiographic
CV : https://www.linkedin.com/in/francois-robin-37819a21/?originalSubdomain=fr
AUTRES RESSOURCES SOUHAITEES
Electro-mécanique, programmation Python-Arduino, Instrumentation et capteurs
DESCRIPTION DU PROJET (QUOI)
Description succinte du projet
Le projet OPEN CLINOSAT 3D vise à développer un clinostat 3D open hardware, outil de simulation de microgravité utilisé pour l’étude comportementale du vivant dans le contexte de la recherche spatiale.
« Le premier clinostat connu sous ce nom dans l'histoire des sciences a été inventé et breveté par Julius von Sachs au tout début du xxe siècle, mais en 1703 Denis Dodart avait déjà conçu un système similaire. Réalisé par Newcombe, le premier clinostat à moteur électrique daterait de 1897 …
Un clinostat 3xD, ou « clinostat à deux axes » (en anglais random positioning machine ou RPM, machine à orientation aléatoire) permet de simuler un effet anti-gravitationnel dans toutes les directions.
Ces machines se composent souvent de deux cadres, l'un placé à l'intérieur de l'autre, chacun tournant de façon indépendante à une certaine vitesse, permettant la rotation d'échantillons dans tous les plans.» in https://fr.wikipedia.org/wiki/Clinostat
Il existe des modèles commerciaux dont le prix ne permet pas une large diffusion que ce soit à usage semi-professionnel ou pédagogique et c’est pour proposer une solution accessible open source et en auto-construction à partir d’éléments bon marché du commerce et de solutions open source que ce projet OPEN CLINOSTAT 3D est développé.
L’ambition est de mettre à disposition de la Fédération – Open Space Makers, mais aussi à l’ensemble du public une solution sous licence Open Source dont la réalisation coûte moins de 1000 € et qui puisse être améliorée par la communauté.
Etat de l’art
Depuis la fin du XIX siècle et la création des premiers clinostats électrique les progrès tant dans la conception (passage de la clinorotation avec un seul axe de rotation horizontal au systeme de position aléatoire Random Positionning Machine basé sur la rotation sur deux axes orthogonaux) que dans l'étude des conséquences sur les sujets biologiques sont considérables.
Le projet constiste à implémenter un RPM, solution la plus flexible puisque pouvant être utilisé en 3D comme en 2D.
Plusieurs principes mécaniques sont utilisés, mais le plus commun consiste en deux cadres soit rectangulaires soit en forme de U imbriqués l'un dans l'autre.
Des contacts tournants permettent d'alimenter et piloter les moteurs et les dispositifs expérimentaux au centre du clinostat.
Nous nous sommes inspiré del'étude de l'Université d'Amsterdam suivante : Borst, A. G., & van Loon, J. J. W. A. (2009). Technology and developments for the Random Positioning Machine, RPM. Microgravity Science and Technology, 21(4), 287-292. https://doi.org/10.1007/s12217-008-9043- 2 https://pure.uva.nl/ws/files/903914/79169_metis316931.pdf
Concernant les effets sur les êtres vivants, beaucoup d'organismes ont été testé.
- En tout premier lieu les plantes et leurs croissances dès la fin du XIX siècle. Ce géotropisme a été démontré dès 1807-1811 par T. A. Knight à l'aide d'un clinostat 2D. in https://www.universalis.fr/encyclopedie/tropismes-vegetaux/2-le-geotropisme/
Citons aussi des études sur :
- les preosteoblastes et donc sur les conséquences de la microgravité sur les os, par exemple : https://www.physiology.org/doi/pdf/10.1152/ajpcell.00222.2004
- les macrophages et la comparaison des résultats avec des clinostats 2D/3D : https://link.springer.com/content/pdf/10.1007%2Fs12217-019-9687-0.pdf
La plupart de ces études concernent des organismes cultivés sur des milieux solides (terre, substrat gélifié dans des boites de Petri).
Mise en valeur du niveau d’innovation et apport du projet au domaine
L'innovation du projet porte d'une part sur le mode de construction du clinostat à partir de spécifications en Open Source, de materiaux du commerce standard et si possible basés sur de l'Open Source comme les composants Arduino, des langages de développement eux aussi libres comme Python, avc l'objectif ambitieux de limiter les coût à 1000 euros, pour permettre la diffusion la plus large du projet.
Il s'agit d'un projet d'Open Innovation, puisque l'un des bénéfices attendus est l'apport des makers pour améliorer le dispositif proposé.
La particularité de ce projet est de proposer un emplacement pour l'expérimentation suffisant pour pouvoir tester une nacelle pouvant atteindre la taille d'un cube de 3U de côté (30 cm) et donc un clinostat robuste et assez puissant capable de mettre en rotation une charge d'une dizaine de Kg.
Enfin, le processus de validation du dispositif s'appuie sur une expérience originale développée avec le laboratoire M3 CNRS - Sorbonne Universités. Station biologique de Roscoff, expérience qui se passe en milieu liquide ce qui à notre connaissance n'a jamais été tenté.
Impact sociétal, environnemental, économique
Ce projet doit permettre
- aux équipes de recherche de construire facilement un clinostat 3D adapté à leurs besoins propre de recherche en s'appuyant sur la documentation open source des spécifications, principal livrable du projet
- au monde académique (universitaire et scolaire) de construire à coût maitrisé un clinostat sous forme de projet associant enseignants et élèves afin d'expérimenter la microgravité sur des échantillons de toute nature
- aux associations et hobbyistes de saisir l'occasion de construire un projet en mode participatif
- pour tous de contribuer activement à l'évolution de la solution dans le cadre de contributions open source
et ce en choisissant la solution adaptée à la capacité financière du partenaire (de 500 à 1000 €).
Il s'agit donc d'un projet pouvant servir à la recherche, à l'enseignement comme à l'éducation populaire.
Niveau actuel du projet
Le proof of concept ayant été achevé début 2019, les différentes étapes et leur degré d'avancement sont précisés dans le chapitre PLANNING
Niveau souhaité d’aboutissement dans le cadre de cette demande
Pas de demande en cours, le projet étant financé par PING dans le cadre du projet "Récits Nature".
CONTEXTE (OÙ)
Environnement du projet
Le projet est esssentiellement conçu et réalisé dans le cadre d'une coopération intense entre le Laboratoire M3 (Modèles Marins Multicellulaires) CNRS - Sorbonne Universités. Station biologique de Roscoff et l'association PING de Nantes.
Une partie des échanges se font par téléphones, complétés par des visites sur le site de Roscoff.
Caractérisation du marché et concurrence
Les principales solutions industrielles sont peu nombreuses (Airbus, Nasa ...) et sont de 5 à 20 fois plus onéreuses que le projet proposé. Ces projets sont fermés et donc peu paramétrables à l'opposé de l'Open clinostat 3D.
L'objectif est moins de concurrencer ces solutions que d'élargir le marché vers des acteurs ne pouvant ou ne souhaitant pas investir des montants importants et près à jouer le jeu de l'Open Source.
Analyse de risque WSOT
| Atouts | Handicaps | |
| Interne |
Richesse et pluridisciplinarité de l'équipe. Test s'appuyant sur une expérimentation originale Dynamique de la communauté Open Source |
Maîtrise de nombreuses technologies et technique. Gestion d'un projet multi-partenaires éloignés géographique-ment |
| Marché |
Prix Adaptabilité par l'utilisateur |
Pas de garantie, car basé sur : -Automaintenance |
PLANNING (QUAND)
Durée du projet
Date début : 01/02/2019
Date Fin : 01/03/2020
Ressources mobilisées (H/J)
Nombre de Jours/homme prévu : 272
Réalisé 88 J/H (32% du total)
Délai consommé 5mois/13 (38%)
Macroplan (tâches/responsable/ressources/délais)

METHODOLOGIE (COMMENT)
Méthodologie de mise en œuvre
La méthodologie utilisée est celle du Design Thinking qui a été décrite en détail dansMETHODOLOGIE : Le design thinking
et qui a été utilisée dans la phase de préprojet.
En voici un résumé succint :
Le Design thinking est un processus d’innovation centrée sur l’homme, son objectif est de concevoir le bon produit et/ou service qui répond au bon besoin en faisant appel à des équipes pluridisciplinaires.
Cette méthode intègre pleinement et continuellement les usagers finaux dans le processus, s'appuyant notamment sur des phases de prototypage.
L’avancement d’un projet design thinking n’est pas linéaire, mais itératif autour des étapes suivantes :
- Découvrir : il s’agit de la phase de recherche, celle où toute l’équipe va poser son regard sur le besoin et son contexte pour mieux le cerner. L’équipe va se forger une vision globale du problème qui a été révélé.
- Orienter : c’est là que l’équipe va définir le besoin qu’elle a constaté avec précision et définir ses objectifs.
- Imaginer : l’équipe et les utilisateurs vont imaginer des solutions répondant au besoin. L’objectif étant de récolter un maximum d’idées.
- Concevoir : ici, l’équipe va commencer à matérialiser un ou plusieurs concepts, à partir des idées produites à l’étape précédente. Elle va réconforter ces concepts aux utilisateurs pour en valider un ou plusieurs répondants au mieux au besoin.
- Réaliser : une fois le ou les concepts sélectionnés, l’équipe va passer à la réalisation de ceux-ci, d’abord en maquette puis en prototype jusqu’à arriver au résultat le plus satisfaisant. Ici encore le fonctionnement se fait par essai-erreurs, chaque production est confrontée à la réalité via les utilisateurs finaux pour affiner au mieux jusqu’à atteindre la réalisation finale.
- Introduire : Une fois la solution conçue et validée, celle-ci va pouvoir être introduite sur le marché, c’est là qu’elle va devenir réellement une innovation, une fois que les utilisateurs l’auront adoptée.
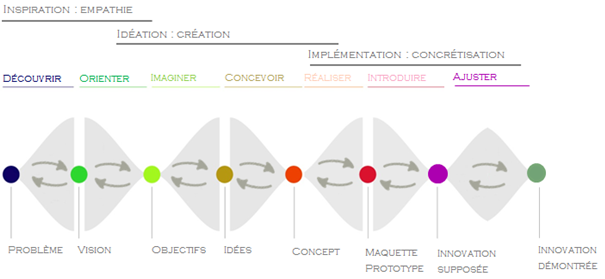
Tout au long du projet, "des phases de divergences s’alternent avec des phases de convergences". C’est-à-dire qu’à certaines étapes, celles divergentes, on va se donner du choix, tout est bon à prendre on ne s’interdit rien. À d’autres étapes, celles convergentes, on va faire des choix parmi la quantité de choix que l’on s’est donné à l’étape précédente.
Stratégie de développement
La stratégie de développement s'est appuyé sur un processus itératif décomposé en deux grands cycles pour lequel l'ensemble des étapes a été parcouru, le premier cycle correspondant au pré-projet et aboutissant au proof of concept décrit en détail dans le § PRE-PROJET : DOCUMENTATION DU PROOF OF CONCEPT
La deuxième phase est actuellement en cours et correspond au projet Open 3D Clinostat proprement dit.
En fait elle implique deux sous-projets :
- d'une part le développement matériel du mécanisme et du pilotage de clinostat
- d'autre part le développement de l'expérimentation biologique qui permettra de valider le dit clinostat.
Pour chacun de ces deux projets on utilise la méthodologie de Design Thinking.
Les étapes de progression font l'objet de points téléphoniques réguliers entre le laboratoire M3 et PING et chaque étape de validation est réalisée dans les locaux de M3 à Roscoff.
Le suivi du respect des contraintes financières est réalisé par le service de gestion de PING.
Etapes du projet de R&D
Le proof of concept ayant permis de débroussailler les problématiques fonctionnelles et techniques, la nouvelle phase de R&D du premier sous-projet est surtout centrée sur le passage à l'échelle.
Concernant le deuxième sous-projet les phases d'idéation ont permis de préciser les besoins de l'expérience en alimentation énergétique, en recueil des signaux des capteurs, en gestion des éclairages et de maintien du milieu nourricier.
Identification des technologies requises
L'identification des technologies requises a été initiée pour l'essentiel lors du pré-projet.
Il s'agit pour la motorisation de moteurs pas à pas NEMA 17 munis d'une démultiplication importante (1/100) piloté par des cartes Arduino via des microstep -drivers/cartes de puissance ST6600.
Le projet réutilisera les mêmes composants et testera une démultiplication moindre (1/50) afin de disposer d'une plage de vitesse de rotation plus étendue (0 à 2 tours/mn pour chaque axe).
L'ensemble des pièces en ABS sont conçues avec TinkerCad et imprimés sur UP Plus 2.
La réalisation s'est appuyée sur les outils disponibles au fablab Plateforme C de PING.
La partie expérience embarquée necessite plusieurs types de technologie pilotées soit en Arduino, soit en Python avec
- pilotage de leds RGBW
- circulation de fluides avec pompe peristaltique
- refroidissement thermostaté des fluides avec éléments Peltier et échangeur thermique.
- pilotage des capteurs physico-chimiques.
- conception des "cellules de vie" avec Inkscape et réalisation en plexiglass à la découpe laser
Points de difficultés à lever
En ce qui concerne le clinostat, les principales difficultés sont centrées sur la robustesse de la motorisation et sur les collecteurs tournants.
Pour ce qui est de l'expérience embarquée, l'étanchéïté, la stabilité de l'écosystème, les capteurs de CO2 et O2 sont les points les plus délicats à maîtriser.
BUDGET (COMBIEN)
Coût global
272 jours, non valorisés
4 Déplacements réunions Nantes-Roscoff (425 €/personne/déplacement) 1700€
Matériels et logiciels
Prix Unité Nombre Total
Barres alu 60x60 mm 4mm epais 1m 32,00 € 13 416,00 €
Nema 17 avec réducteur 99:1 56,00 € 2 112,00 €
Arduino UNO 22,00 € 2 44,00 €
Contrôleur TB6600 20,00 € 2 40,00 €
Collecteurs rotatif trou central 7mm 4 fils 20,00 € 2 40,00 €
Collecteurs rotatif 12 fils 26,00 € 2 52,00 €
Fil imprimante 3D ABS 20,00 € 1 20,00 €
Quincaillerie 50,00 € 1 50,00 €
TOTAL 774,00 €
Ressourses financières nécessaires, autofinancement et autres ressources et support attendu de la Fédération
Actuellement le support financier de la Fédération n"est pas sollicité.
Le projet s'appuie sur la communication et les outils de gestion de projet de la Fédération et bien évidemment nous sommes ouverts à l'aide que pourrait apporter la communauté.
MOTIVATION DES ACTEURS (POURQUOI)
Sens de votre engagement au sein de la Fédération
L'ensemble des participants au projet sont très attachés aux valeurs et vertus de l'Open Source et de l'éducation populaire. A cela s'ajoute la volonté de valoriser et démocratiser ces travaux par la médiation d'un acte artistique autour du thème spatial, notamment au travers de la participation de Miha Turšič de la WAAG SOCIETY AMSTERDAM et de Ewen Chardronnet de Makery - Art2M.
Raisons du développement du projet
L'histoire même du pré-projet démontre le rôle important joué par les différentes entitées Laboratoire M3 de Roscoff, PING, Fédération, WAAG SOCIETY AMSTERDAM, dans l'émergence de ce projet :
Le 24 mai 2018 ce projet est né d'une rencontre lors d'une présentation
par Ewen Chardronnet
7 – 11 juillet 2018 Summerlab Saint Nazaire, la première phase d'idéation a été lancée avec
C'est lors de cette réunion que les bases du projet ont été jetées sur le papier et que l'équipe a été consolidée.
Le proof of concept a fait l'objet de travaux de conception et de réalisation au quatrième trimestre 2018.
11 – 12 Décembre 2018 à Roscoff Présentation du Proof of concept au laboratoire M3 et décision de passer en mode projet.
Motivation de l’équipe
Il y a donc quatre raisons principales pour ce projet :
- la volonté d'expérimenter les effets de la microgravité,
- la contribution aux travaux sur le Ver de Roscoff,
- l'éducation populaire - Xavier Bailly ayant montré la voie en développant un Kit expérimental sur le Ver de Roscoff en direction des établissements scolaires et universitaires qu'il a d'ailleurs présenté lors du TEDx de Rennes 2019 Xavier Bailly TEDx