 Open Clinostat 3D
Open Clinostat 3D
PRE-PROJET : Documentation du Proof of concept
OBJECTIFS D’UN PROOF OF CONCEPT.
Un proof of concept n’a pas l’ambition d’être opérationnel, mais de vérifier le premier niveau de faisabilité du projet, d’identifier les problématiques, d’explorer et d’évaluer des solutions. Cette démarche de tâtonnement n’exclue pas d’arriver à une solution qui fonctionne, mais elle n’a pas l’ambition de faire une réalisation robuste, fiable et atteignant tous les objectifs assignés au projet.
Ceci est donc une première version permettant de débroussailler le terrain devant aboutir à terme à un Clinostat pleinement utilisable en laboratoire. Cet appareil n’est pas équipé spécifiquement pour une expérience mais permet d’installer une expérience de son choix équipée ou non de capteurs.
DEFINITION D’UN CLINOSTAT 3D
La définition la plus classique est disponible sur Wikipedia : https://fr.wikipedia.org/wiki/Clinostat
Un clinostat 3D, ou « clinostat à deux axes » (en anglais random positioning machine (en) ou RPM, machine à orientation aléatoire) permet de simuler un effet anti-gravitationnel dans toutes les directions.
Ces machines se composent souvent de deux cadres, l’un placé à l’intérieur de l’autre, chacun tournant de façon indépendante à une certaine vitesse, permettant la rotation d’échantillons dans tous les plans…
Les clinostats tournent généralement à faible vitesse (clinostat à « rotation lente »), pour limiter les effets centrifuges. Il y a eu débat quant à lavitesse de rotation la plus appropriée, car si elle est trop lente, la plante ou l’animal a le tempsd’élaborer des réponses physiologiques à la gravité,et si elle est trop rapide, la force centrifuge et les tensions mécaniques seront responsables d’artefacts. Pour la simulation de culture de végétaux à faible pesanteur, la vitesse de rotation optimale a, dès la fin des années 1960, été calée sur cellede « vraies » réponses à la microgravité comme on les voit dans l’espace. Elle est programmée entre 0,3 et 3 tr/min pour la plupart des systèmes fabriqués en usine…
La structure d’un clinostat ressemble le plus souvent à cela :

CONSTRUCTION DU SQUELETTE METALLIQUE
L’architecture retenue est proche de celle de laphoto ci dessus. La différence essentielle est dansla base qui est sous forme de parallélépipèderectangle plus facile à réaliser qu’une forme prismatique.

La réalisation se base sur des éléments que l’on peut trouver très facilement dans les grandes surfaces de bricolage, des tubes d’aluminium de section 30x30 mm.
ces sections sont reliées par des cornières emboîtables en matière plastique qui sont disponibles chez les mêmes fournisseurs.
Voici les différentes longueurs des segments ayant servi au montage
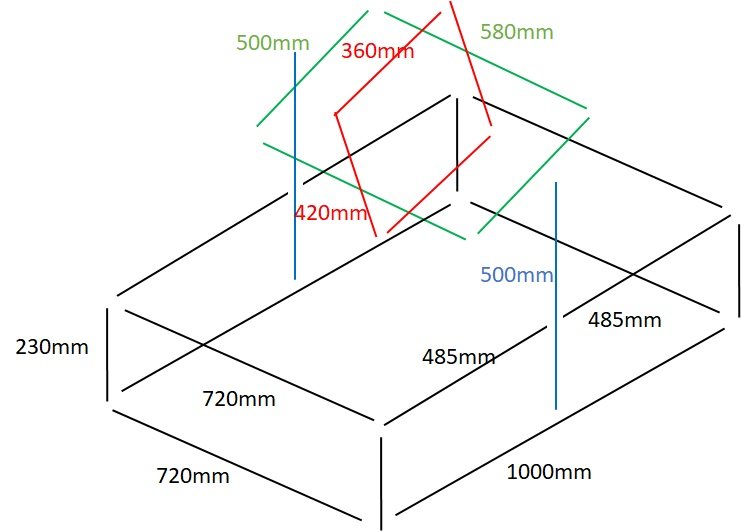
et la liste récapitulative.
- Support du clinostat
- Support inférieur
•2 tubes 1000 mm
•2 tubes 720 mm - Cotés du support
•4 tubes 230 mm - Support supérieur
•4 tubes 485 mm
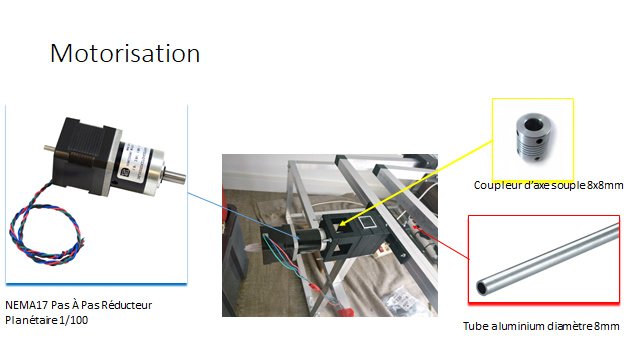
- Support du moteur et du connecteur tournant extérieurs
•2 tubes 500 mm percés à 30 mm d’une extrémité d’un trou de 10 mm pour laisser passer les axes de rotation - Support du moteur et du connecteur tournant intérieurs
•2 tubes 500 mm percés en leur milieu d’un trou de 10 mm pour laisser passer les axes de rotation extérieurs
•2 tubes 580 mm percés en leur milieu d’un trou de 10 mm pour laisser passer les axes de rotation intérieurs - Support de l’expérimentation
•2 tubes 42 mm percés en leur milieu d’un trou de 10 mm pour laisser passer les axes de rotation extérieurs
•2 tubes 36 mm
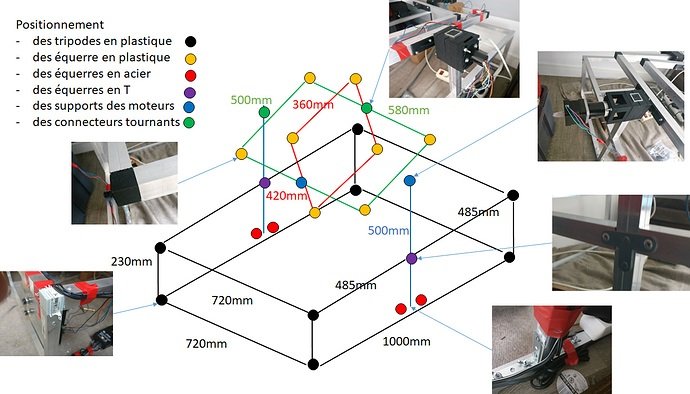
Les connecteurs nécessaires sont les suivants :
- 8 tripods plastiques
- 8 équerres plastiques
- 4 équerres acier
- 2 équerres acier en T

Les différents éléments se combinent de la manière suivante :
{kind=link}
CONCEPTION DES SUPPORTS MOTEURS EN IMPRESSION 3D
Afin de maintenir les différents moteurs et les axes de rotation vous pouvez trouver les fichiers STL nécessaires sur le serveur Tinkercad.com aux URLs précisées ci-dessous.
Chaque élément est présenté avec une photo détaillant le positionnement de l’élément dans le montage.
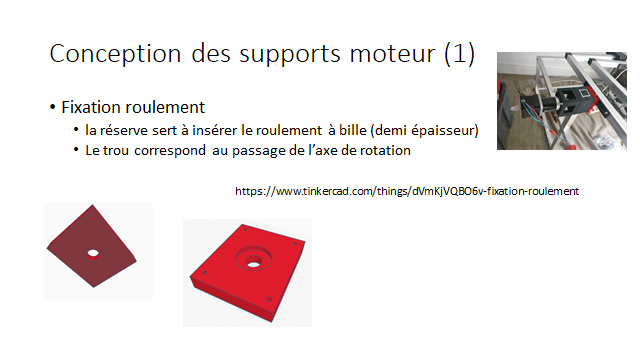
https://www.tinkercad.com/things/dVmKjVQBO6v-fixation-roulement
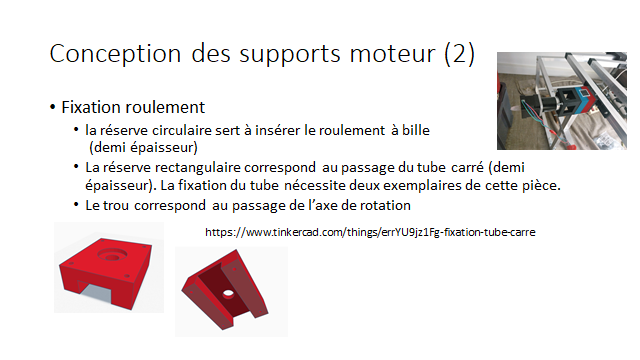
https://www.tinkercad.com/things/errYU9jz1Fg-fixation-tube-carre

https://www.tinkercad.com/things/1m9UkepYvjW-transition-accouplement-souple
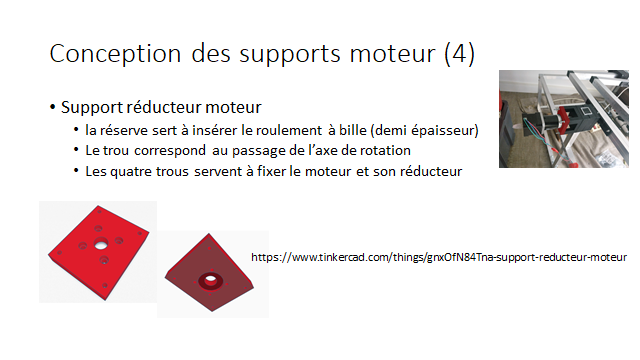
https://www.tinkercad.com/things/gnxOfN84Tna-support-reducteur-moteur


https://www.tinkercad.com/things/gnxOfN84Tna-support-reducteur-moteur
CONCEPTION DES SUPPORTS DES COLLECTEURS TOURNANT EN IMPRESSION 3D
Les collecteurs tournants retenus sont de la gamme SRC0022, qui peuvent aller jusqu'à 24 pistes. Pour le proof of concept ce sont des 12 pistes, mais tout dépend du nombre de capteurs à piloter ou de la technique utilisée ; si par exemple on met une arduino pour serialiser les données des capteurs le nombre de fils peut être réduit ; au contraire on réserve un couple de fil pour chaque capteur afin de récupérer les données sur un ordinateur extérieur ce nombre peut vitre croître de manière importante. On peut aussi préférer des liaisons wifi ou bluetooth.
Voici les spécifications techniques :
https://www.combinent.com/wp-content/uploads/2015/09/Combinent_SRC022_web.pdf
Attention les prix sont très variables suivant les distributeurs ... du simple au double !
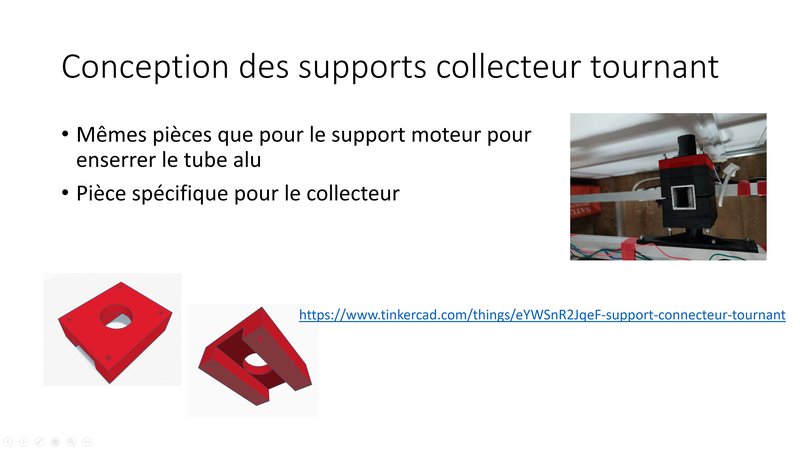
La fixation des collecteurs est strictement la même que pour les moteurs pour ce qui concerne les pièces entourant le tube d'aluminium de la structure. Par contre il faut utiliser une pièce spécifique pour le collecteur tournant comme suit :
https://www.tinkercad.com/things/eYWSnR2JqeF-support-connecteur-tournant
CONCEPTION DE L’ELECTRONIQUE DE COMMANDE
La partie électronique est basée sur des cartes Arduino Uno et des drivers de puissance TB6600.
Après essai du pilotage de deux moteurs par une seule carte arduino équipée de deux potentiomètres et de deux TB6600 il apparait que des courants de fuite existent et créent des disfonctionnements.
Il est donc préférable de dédier une carte Arduino pour chaque moteur.
Quand aux drivers, il les essais sur des cartes moins puissantes que les TB6600 se sont avérés peu concluants, car trop fragiles.
Le montage pour chaque moteur est le suivant :
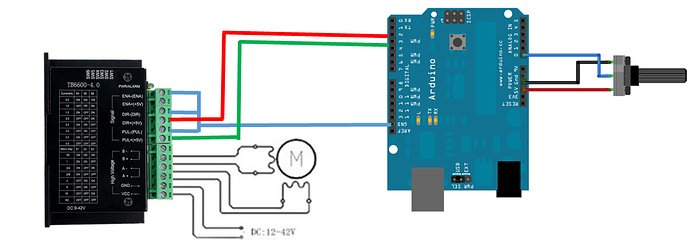
{kind=link}
et le code Arduino
#include <AccelStepper.h>
#include <MultiStepper.h>
// The Stepper pins
#define STEPPER1_DIR_PIN 3
#define STEPPER1_STEP_PIN 2
// Define stepper and the pins it will use
AccelStepper stepper1(2, STEPPER1_STEP_PIN, STEPPER1_DIR_PIN);
AccelStepper stepper2(2, STEPPER2_STEP_PIN, STEPPER2_DIR_PIN);
void setup()
{
stepper1.setAcceleration(1.0);
stepper1.setMaxSpeed(5000);
}
void loop()
{
// read the potentiometer value:
int sensorReading1 = analogRead(A0);
// map it to a range from 0 to 100:
int motorSpeed1 = map(sensorReading1, 0, 1023, 0, 1000);
// set the motors speed:
stepper1.setSpeed(motorSpeed1);
stepper1.moveTo(10);
stepper1.run();
// stepper2.run();
}
BUDGET
Prix Unité Nombre Total
Barres alu 24x24 mm 1,5mm epais 1m 10,00 € 13 130,00 €
Connecteurs nylon 3,00 € 10 30,00 €
Nema 17 avec réducteur 99:1 56,00 € 2 112,00 €
Arduino UNO 22,00 € 2 44,00 €
Contrôleur TB6600 20,00 € 2 40,00 €
Collecteurs rotatif 12 fils 26,00 € 2 52,00 €
Fil imprimante 3D 20,00 € 1 20,00 €
quinquaillerie 30,00 € 1 30,00 €
TOTAL 458,00 €
CONCLUSION
Ce proof of concept fonctionne.
Des tests vont être mis en oeuvre après développement d'une expérience biologique embarquée.
En son centre on peut placer une expérience pouvant s’inscrire dans un cube de 3 U de côté (35 cm) et disposant d’une alimentation électrique 6-9v. Les vitesses de rotations sont d’un tour par minute maximum.
Pour le prototype il faudra renforcer la structure pour rigidifier le dispositif, élargir la plage de vitesses de rotation, cacher les fils électriques, augmenter la puissance électrique disponible au centre, et prévoir une connexion USB ou radio entre l’expérience et un ordinateur extérieur …